





富士重工的车载立体摄像头:一年内实现商品化
富士重工业(以下简称富士重工)的“力狮”从2010年5月开始配备具有车载立体摄像头的可拆卸驾驶辅助系统“EyeSight(ver.2)”。该系统不仅可以识别障碍物及前方车辆,还紧紧地吸引住了驾驶员,所以在销售车辆中获得了惊人的安装率。富士重工最初开发仅靠摄像头来识别前方情况的技术的时间,其实要追溯到20多年前。
“在2011年4~6月销售的新车中EyeSight的安装率达到了约75%”(富士重工公关部)。
“力狮”是富士重工的旗舰车型。该车配备了一种安装率惊人之高的车载系统。这就是利用立体摄像头来识别障碍物及前方车辆,以减轻碰撞伤害的驾驶辅助系统“EyeSight(ver.2)”。该系统的最大特点是配备了车速低于30km/h时可避免撞上前方障碍物的自动制动功能。不使用毫米波雷达或激光雷达,只采用基于摄像头的图像识别技术来实现这一功能的,目前全球还只有富士重工一家。
富士重工以“不会发生碰撞的汽车”为口号大力宣传该功能,还积极在电视、报纸及杂志上投放广告,同时还举办了试驾体验会。这些宣传措施再加上前所未有的低价格——用户只需多花10万日元左右即可选配,结果使该系统成为了力狮不可缺少的装备。
不过,EyeSight系统的开发也曾一度陷入危机状态,坚持不懈的富士重工为此曾付出了长达20多年的努力。
开发始于1989年
富士重工开发立体摄像头的历史可追溯到成立斯巴鲁技术研究所的1989年。研究所的成立目的是从公司内外广为聘请各领域的研究人才研发尖端技术,向本公司及其他公司提供研发成果。
研究所从成立之初就开始致力于汽车的智能化及机器人技术的研发,并在此过程中开始研究使用立体摄像头的图像识别技术。立体摄像头可利用两个摄像头的视差,像肉眼一样完成图像的立体识别。从这一点来说,立体摄像头的优势大于普通摄像头。
但立体摄像头存在的问题是图像处理数据随之增加、处理时间变长。应用于汽车领域时,开发的竞争焦点是如何提高图像识别精度、缩短处理时间,以及确保实时性。
十川能之(现任斯巴鲁技术研究所主任)从1991年开始从事立体摄像头的开发。研究所于1991年在“东京车展”上展示了使用立体摄像头的技术概念,1992年还在公司内部发布了使用立体摄像头进行图像识别的技术成果。
成果发布会上公开演示的具体内容是,识别前方车辆并通过紧急制动来避免碰撞的技术、识别白线并沿白线行驶的自动驾驶技术,以及与前方车辆之间的距离测量技术等。
不过,演示时试制车配备的图像处理装置尺寸很大,占满了力狮的行李舱。尽管采用立体摄像头的图像识别系统的尺寸当时还达不到汽车产品化的要求,但除了汽车领域之外,铁路领域及飞机领域也在开发这种系统。其实,当时已有铁路将其用于道口监视系统、飞机将其用作直升机降落辅助系统的先例。
日本的汽车厂商纷纷参与ASV项目,并为率先配备全球独自功能而展开了竞争。富士重工也推进了有关ASV的先行开发。当时,樋渡穣(现任斯巴鲁技术研究所主管兼斯巴鲁技术本部技术开发部主管)并未在研究所,而是在底盘控制开发部门开发前方确认及追踪巡航控制等ASV技术。樋渡试制了使用激光雷达来识别前方障碍物的车辆,并进行了与制动器联动控制车辆的试验,收集了大量数据。
虽然樋渡知道研究所正在研发立体摄像头,但根据当时图像识别能够实现的可靠性等,他推断“短期内还无法使用”。他做梦也没有想到,这种立体摄像头与自己开发的ASV技术会在短短几年后融合在一起。
虽然完成了试制品
研究所为了使立体摄像头实际用于汽车用途,从1995年前后开始寻找合作部件厂商。表现出了积极姿态的是当时的Kansei(现为康奈可)。仅仅在1年后的1996年,研究所就做出了由立体摄像头与图像处理装置构成的试制品。于是研究所的人来到富士重工负责产品化的技术本部进行技术说明。
“不错吧?图像处理装置已经变得这么小了。”
“那成本是多少?”
“35万日元左右就能造出来。”
“35万?!”
研究所的人非常自信地推介试制品,以前占满整个行李舱的图像处理装置缩小到了盒式录像机大小,而且成本也比研究所试制的专用品降低了很多。但技术本部的反应却完全出乎意料。
“这还无法商品化。”
技术本部认为,要想产品化,现在的装置尺寸仍嫌大,而且系统可靠性及量产效率方面还存在很多问题。
赶在日产实用化之前
尽管这一结论令研究所大失所望,但情况却在1997年出现了大的转机。当时富士重工的一名董事发出了一声号令。
“一年之内实用化。”
“啊,只有一年的时间吗?”
“对。技术本部马上成立项目组,总之要尽快实现商品化。”
当时的富士重工正与日产汽车进行技术合作,双方可以比较自由地使用对方的技术。通过技术合作,两公司还曾相互使用过4WD系统及无级变速箱(CVT)。
日产汽车对斯巴鲁技术研究所的立体摄像头图像识别技术很感兴趣,为了使采用该技术的驾驶辅助系统达到实用水平,日产开始推进开发。这一情报当然也传到了富士重工。
“作为最先开发该技术的人,富士重工无论如何也要拿下驾驶辅助系统的‘全球首次’实用化称号!”。为此,研究所与富士重工技术本部的设计团队紧急成立了联合项目组。
因为不是飞机
就在研究所发布成果的同时,日本的汽车业界掀起了ASV(先进安全汽车)开发风潮。1991~1995年度日本交通省(现为国土交通省)汽车交通局实施了“首期ASV推进计划”,该计划旨在实现汽车的高智能化,在2000年前后实现避免事故的驾驶辅助系统实用化。
日本的汽车厂商纷纷参与ASV项目,并为率先配备全球独自功能而展开了竞争。富士重工也推进了有关ASV的先行开发。当时,樋渡穣(现任斯巴鲁技术研究所主管兼斯巴鲁技术本部技术开发部主管)并未在研究所,而是在底盘控制开发部门开发前方确认及追踪巡航控制等ASV技术。樋渡试制了使用激光雷达来识别前方障碍物的车辆,并进行了与制动器联动控制车辆的试验,收集了大量数据。
虽然樋渡知道研究所正在研发立体摄像头,但根据当时图像识别能够实现的可靠性等,他推断“短期内还无法使用”。他做梦也没有想到,这种立体摄像头与自己开发的ASV技术会在短短几年后融合在一起。
虽然完成了试制品
研究所为了使立体摄像头实际用于汽车用途,从1995年前后开始寻找合作部件厂商。表现出了积极姿态的是当时的Kansei(现为康奈可)。仅仅在1年后的1996年,研究所就做出了由立体摄像头与图像处理装置构成的试制品。于是研究所的人来到富士重工负责产品化的技术本部进行技术说明。
“不错吧?图像处理装置已经变得这么小了。”
“那成本是多少?”
“35万日元左右就能造出来。”
“35万?!”
研究所的人非常自信地推介试制品,以前占满整个行李舱的图像处理装置缩小到了盒式录像机大小,而且成本也比研究所试制的专用品降低了很多。但技术本部的反应却完全出乎意料。
“这还无法商品化。”
技术本部认为,要想产品化,现在的装置尺寸仍嫌大,而且系统可靠性及量产效率方面还存在很多问题。
赶在日产实用化之前
尽管这一结论令研究所大失所望,但情况却在1997年出现了大的转机。当时富士重工的一名董事发出了一声号令。
“一年之内实用化。”
“啊,只有一年的时间吗?”
“对。技术本部马上成立项目组,总之要尽快实现商品化。”
当时的富士重工正与日产汽车进行技术合作,双方可以比较自由地使用对方的技术。通过技术合作,两公司还曾相互使用过4WD系统及无级变速箱(CVT)。
日产汽车对斯巴鲁技术研究所的立体摄像头图像识别技术很感兴趣,为了使采用该技术的驾驶辅助系统达到实用水平,日产开始推进开发。这一情报当然也传到了富士重工。
“作为最先开发该技术的人,富士重工无论如何也要拿下驾驶辅助系统的‘全球首次’实用化称号!”。为此,研究所与富士重工技术本部的设计团队紧急成立了联合项目组。
因为不是飞机
“嗯,这根本就拿不到桌面上来……”。项目组成员聚在一起让研究所及合作企业Kansei介绍技术概要时,以宫泽与确井为代表的技术本部设计团队的眉头越皱越紧。这是因为研究所的系统完全没有考虑量产性。
项目组的设计团队接二连三地提出了很多问题。
“左右摄像头的安装误差允许范围多大?”
“只允许有数μm级别的误差。”
“μm级别?量产中怎么也不可能实现如此高精度的定位。这可不是制造飞机。”
“那就无法保证性能。”
“……”
设计团队听到这样的回答不禁诧异,于是继续发问。
“立体摄像头的初始设定时,如何进行左右摄像头的图像匹配?”
“在研究所使用的是篱笆。有不规则色阶,最适合图像匹配。”
“篱笆?”
“灌木丛中有很多树叶,而且形状各异,非常适合图像匹配。”
“这是无法用于工厂初始设定的……”
“也是啊。该怎么办呢?”
“……”
类似这种研究所与技术本部的设计团队在对待产品化问题存在的认识差异,在随后的开发上也变成了一大障碍。
“在2011年4~6月销售的新车中EyeSight的安装率达到了约75%”(富士重工公关部)。
“力狮”是富士重工的旗舰车型。该车配备了一种安装率惊人之高的车载系统。这就是利用立体摄像头来识别障碍物及前方车辆,以减轻碰撞伤害的驾驶辅助系统“EyeSight(ver.2)”。该系统的最大特点是配备了车速低于30km/h时可避免撞上前方障碍物的自动制动功能。不使用毫米波雷达或激光雷达,只采用基于摄像头的图像识别技术来实现这一功能的,目前全球还只有富士重工一家。
富士重工以“不会发生碰撞的汽车”为口号大力宣传该功能,还积极在电视、报纸及杂志上投放广告,同时还举办了试驾体验会。这些宣传措施再加上前所未有的低价格——用户只需多花10万日元左右即可选配,结果使该系统成为了力狮不可缺少的装备。
不过,EyeSight系统的开发也曾一度陷入危机状态,坚持不懈的富士重工为此曾付出了长达20多年的努力。
开发始于1989年
 |
| 富士重工斯巴鲁技术研究所主任十川能之 |
研究所从成立之初就开始致力于汽车的智能化及机器人技术的研发,并在此过程中开始研究使用立体摄像头的图像识别技术。立体摄像头可利用两个摄像头的视差,像肉眼一样完成图像的立体识别。从这一点来说,立体摄像头的优势大于普通摄像头。
但立体摄像头存在的问题是图像处理数据随之增加、处理时间变长。应用于汽车领域时,开发的竞争焦点是如何提高图像识别精度、缩短处理时间,以及确保实时性。
十川能之(现任斯巴鲁技术研究所主任)从1991年开始从事立体摄像头的开发。研究所于1991年在“东京车展”上展示了使用立体摄像头的技术概念,1992年还在公司内部发布了使用立体摄像头进行图像识别的技术成果。
成果发布会上公开演示的具体内容是,识别前方车辆并通过紧急制动来避免碰撞的技术、识别白线并沿白线行驶的自动驾驶技术,以及与前方车辆之间的距离测量技术等。
不过,演示时试制车配备的图像处理装置尺寸很大,占满了力狮的行李舱。尽管采用立体摄像头的图像识别系统的尺寸当时还达不到汽车产品化的要求,但除了汽车领域之外,铁路领域及飞机领域也在开发这种系统。其实,当时已有铁路将其用于道口监视系统、飞机将其用作直升机降落辅助系统的先例。
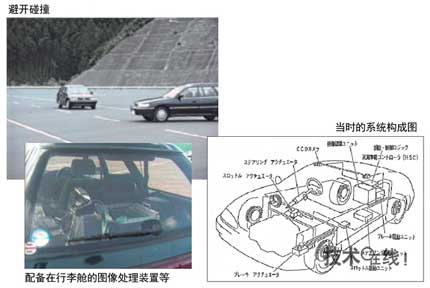 |
| 1992年用试制车进行的躲避碰撞演示 |
ASV开发活跃
就在研究所发布成果的同时,日本的汽车业界掀起了ASV(先进安全汽车)开发风潮。1991~1995年度日本交通省(现为国土交通省)汽车交通局实施了“首期ASV推进计划”,该计划旨在实现汽车的高智能化,在2000年前后实现避免事故的驾驶辅助系统实用化。
 |
| 富士重工斯巴鲁技术研究所主管兼斯巴鲁技术本部技术开发部主管樋渡穰 |
虽然樋渡知道研究所正在研发立体摄像头,但根据当时图像识别能够实现的可靠性等,他推断“短期内还无法使用”。他做梦也没有想到,这种立体摄像头与自己开发的ASV技术会在短短几年后融合在一起。
虽然完成了试制品
研究所为了使立体摄像头实际用于汽车用途,从1995年前后开始寻找合作部件厂商。表现出了积极姿态的是当时的Kansei(现为康奈可)。仅仅在1年后的1996年,研究所就做出了由立体摄像头与图像处理装置构成的试制品。于是研究所的人来到富士重工负责产品化的技术本部进行技术说明。
“不错吧?图像处理装置已经变得这么小了。”
“那成本是多少?”
“35万日元左右就能造出来。”
“35万?!”
研究所的人非常自信地推介试制品,以前占满整个行李舱的图像处理装置缩小到了盒式录像机大小,而且成本也比研究所试制的专用品降低了很多。但技术本部的反应却完全出乎意料。
“这还无法商品化。”
技术本部认为,要想产品化,现在的装置尺寸仍嫌大,而且系统可靠性及量产效率方面还存在很多问题。
赶在日产实用化之前
尽管这一结论令研究所大失所望,但情况却在1997年出现了大的转机。当时富士重工的一名董事发出了一声号令。
“一年之内实用化。”
“啊,只有一年的时间吗?”
“对。技术本部马上成立项目组,总之要尽快实现商品化。”
当时的富士重工正与日产汽车进行技术合作,双方可以比较自由地使用对方的技术。通过技术合作,两公司还曾相互使用过4WD系统及无级变速箱(CVT)。
日产汽车对斯巴鲁技术研究所的立体摄像头图像识别技术很感兴趣,为了使采用该技术的驾驶辅助系统达到实用水平,日产开始推进开发。这一情报当然也传到了富士重工。
“作为最先开发该技术的人,富士重工无论如何也要拿下驾驶辅助系统的‘全球首次’实用化称号!”。为此,研究所与富士重工技术本部的设计团队紧急成立了联合项目组。
因为不是飞机
就在研究所发布成果的同时,日本的汽车业界掀起了ASV(先进安全汽车)开发风潮。1991~1995年度日本交通省(现为国土交通省)汽车交通局实施了“首期ASV推进计划”,该计划旨在实现汽车的高智能化,在2000年前后实现避免事故的驾驶辅助系统实用化。
|
| 富士重工斯巴鲁技术研究所主管兼斯巴鲁技术本部技术开发部主管樋渡穰 |
虽然樋渡知道研究所正在研发立体摄像头,但根据当时图像识别能够实现的可靠性等,他推断“短期内还无法使用”。他做梦也没有想到,这种立体摄像头与自己开发的ASV技术会在短短几年后融合在一起。
虽然完成了试制品
研究所为了使立体摄像头实际用于汽车用途,从1995年前后开始寻找合作部件厂商。表现出了积极姿态的是当时的Kansei(现为康奈可)。仅仅在1年后的1996年,研究所就做出了由立体摄像头与图像处理装置构成的试制品。于是研究所的人来到富士重工负责产品化的技术本部进行技术说明。
“不错吧?图像处理装置已经变得这么小了。”
“那成本是多少?”
“35万日元左右就能造出来。”
“35万?!”
研究所的人非常自信地推介试制品,以前占满整个行李舱的图像处理装置缩小到了盒式录像机大小,而且成本也比研究所试制的专用品降低了很多。但技术本部的反应却完全出乎意料。
“这还无法商品化。”
技术本部认为,要想产品化,现在的装置尺寸仍嫌大,而且系统可靠性及量产效率方面还存在很多问题。
赶在日产实用化之前
尽管这一结论令研究所大失所望,但情况却在1997年出现了大的转机。当时富士重工的一名董事发出了一声号令。
“一年之内实用化。”
“啊,只有一年的时间吗?”
“对。技术本部马上成立项目组,总之要尽快实现商品化。”
当时的富士重工正与日产汽车进行技术合作,双方可以比较自由地使用对方的技术。通过技术合作,两公司还曾相互使用过4WD系统及无级变速箱(CVT)。
日产汽车对斯巴鲁技术研究所的立体摄像头图像识别技术很感兴趣,为了使采用该技术的驾驶辅助系统达到实用水平,日产开始推进开发。这一情报当然也传到了富士重工。
“作为最先开发该技术的人,富士重工无论如何也要拿下驾驶辅助系统的‘全球首次’实用化称号!”。为此,研究所与富士重工技术本部的设计团队紧急成立了联合项目组。
因为不是飞机
项目组由约10名技术人员组成。樋渡被召集来负责整个系统,十川负责与立体摄像头图像识别相关的硬件,宫泽则之(现任斯巴鲁技术本部电子技术部电装设计第1课课长)负责开发此外的系统硬件部分,确井茂夫(现任技术本部电子商品设计部电子商品设计第2课课长)负责开发系统的控制部分。
 |
| 富士重工斯巴鲁技术本部电子技术部电装设计第1课课长宫泽则之(左)与该技术本部电子商品设计部电子商品设计第2课课长确井茂夫(右) |
“嗯,这根本就拿不到桌面上来……”。项目组成员聚在一起让研究所及合作企业Kansei介绍技术概要时,以宫泽与确井为代表的技术本部设计团队的眉头越皱越紧。这是因为研究所的系统完全没有考虑量产性。
项目组的设计团队接二连三地提出了很多问题。
“左右摄像头的安装误差允许范围多大?”
“只允许有数μm级别的误差。”
“μm级别?量产中怎么也不可能实现如此高精度的定位。这可不是制造飞机。”
“那就无法保证性能。”
“……”
设计团队听到这样的回答不禁诧异,于是继续发问。
“立体摄像头的初始设定时,如何进行左右摄像头的图像匹配?”
“在研究所使用的是篱笆。有不规则色阶,最适合图像匹配。”
“篱笆?”
“灌木丛中有很多树叶,而且形状各异,非常适合图像匹配。”
“这是无法用于工厂初始设定的……”
“也是啊。该怎么办呢?”
“……”
类似这种研究所与技术本部的设计团队在对待产品化问题存在的认识差异,在随后的开发上也变成了一大障碍。





























