

Android工程师Google无人驾驶汽车初体验
原理介绍

汽车顶部的激光测距仪是整套系统的核心
据负责无人驾驶汽车项目的总工程师Sebatian Thrun介绍,整个系统的核心是车顶上的激光测距仪(Velodyne 64-beam)。该设备在高速旋转时向周围发射64束激光,激光碰到周围的物体并返回,便可计算出车体与周边物体的距离。计算机系统再根据这些距离数据描绘出精细的 3D 地形图,然后跟高分辨率地图相结合,生成不同的数据模型供车载计算机系统使用。

Google无人驾驶汽车内部情况,由Project Glass拍摄
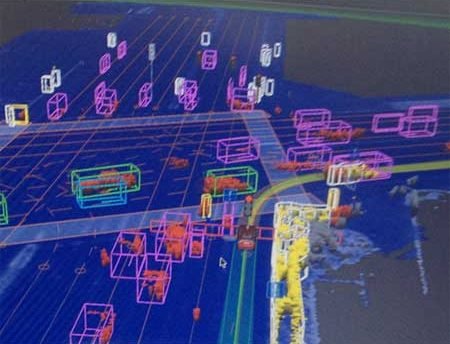
无人驾驶系统描绘出的3D地形图
此外,在汽车的前后保险杠上有四个雷达,用于探测周边情况。后视镜附近有一个摄像机,以检测红绿灯情况。还有一个 GPS、一个惯性测试单元、一个车轮编码器,用来确定车辆位置,跟踪其运动情况。
车身内部也有一系列的感应器。通过感应器,车辆可以清晰"看到"周围物体,清楚掌握它们的大小、距离,时刻对周围环境保持360度无死角关注。它绝不会因为疲劳、醉酒而分散注意力。
所有上述设备采集到的数据都将输入车载计算机,并由Google开发的这套无人驾驶系统在极短的时间内做出判断:是该加速、刹车还是转向。
大规模商用尚待时日
目前Google的试驾车队有8辆无人驾驶汽车,累计已行驶30万公里,行驶路途包括都市、高速路和山路,未出过一次故障。虽然内华达州已经给无人驾驶汽车颁发了牌照,但Google预计,无人驾驶汽车最快也需到2018年才能投入商用。