





汽车的动力转向系统(Power Steering)
编辑本文的目的是利于液压绞盘用户的参考,因为中国汽车绞盘网推荐的液压绞盘(HydraulicWinch)都适用于原车液压动力转向泵作为动力源(在转向助力泵参数满足的情况下)。
一、概述
动力转向(Power Steering)
汽车所使用的动力转向系统,基本上是经修改的手动转向系统,主要的是增加一个助力器(Power Booster),以帮助驾驶者。
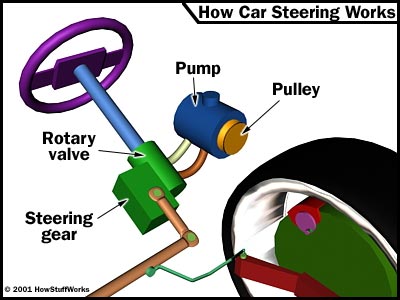
汽车转向系统可按转向的能源不同分为机械转向系统和动力转向系统两类。机械转向系统是依靠驾驶员操纵转向盘的转向力来实现车轮转向;动力转向系统则是在驾驶员的控制下,借助于汽车发动机产生的液体压力或电动机驱动力来实现车轮转向。所以动力转向系统也称为转向动力放大装置。
动力转向系统由于使转向操纵灵活、轻便,在设计汽车时对转向器结构形式的选择灵活性增大,能吸收路面对前轮产生的冲击等优点,因此已在各国的汽车制造中普遍采用。但是,具有固定放大倍率的动力转向系统的主要缺点是:如果所设计的固定放大倍率的动力转向系统是为了减小汽车在停车或低速行驶状态下转动转向盘的力,则当汽车以高速行驶时,这一固定放大倍率的动力转向系统会使转动转向盘的力显得太小,不利于对高速行驶的汽车进行方向控制;反之,如果所设计的固定放大倍率的动力转向系统是为了增加汽车在高速行驶时的转向力,则当汽车停驶或低速行驶时,转动转向盘就会显得非常吃力。电子控制技术在汽车动力转向系统的应用,使汽车的驾驶性能达到令人满意的程度。电子控制动力转向系统在低速行驶时可使转向轻便、灵活;当汽车在中高速区域转向时,又能保证提供最优的动力放大倍率和稳定的转向手感,从而提高了高速行驶的操纵稳定性。
电子控制动力转向系统(简称EPS-Electronic Control Power Steering),根据动力源不同又可分为液压式电子控制动力转向系统(液压式EPS)和电动式电子控制动力转向系统(电动式EPS)。液压式EPS是在传统的液压动力转向系统的基础上增设了控制液体流量的电磁阀、车速传感器和电子控制单元等,电子控制单元根据检测到的车速信号,控制电磁阀,使转向动力放大倍率实现连续可调,从而满足高、低速时的转向助力要求。电动式EPS是利用直流电动机作为动力源,电子控制单元根据转向参数和车速等信号,控制电动机扭矩的大小和方向。电动机的扭矩由电磁离合器通过减速机构减速增扭后,加在汽车的转向机构上,使之得到一个与工况相适应的转向作用力。
二、液压式电子控制动力转向系统
电子控制动力转向系统(EPS)可以在低速时减轻转向力以提高转向系统的操纵性;在高速时则可适当加重转向力,以提高操纵稳定性。液压式电子控制动力转向系统是在传统的液压动力转向系统的基础上增设电子控制装置而构成的。根据控制方式的不同,液压式电子控制动力转向系统又可分为流量控制式、反力控制式和阀灵敏度控制式三种形式。
(一)流量控制式EPSTOP
图 1所示为凌志牌轿车采用的流量控制式动力转向系统。由图可见,该系统主要由车速传感器、电磁阀、整体式动力转向控制阀、动力转向油泵和电子控制单元等组成。电磁阀安装在通向转向动力缸活塞两侧油室的油道之间,当电磁阀的阀针完全开启时,两油道就被电磁阀旁路。流量控制式动力转向系统就是根据车速传感器的信号,控制电磁阀阀针的开启程度,从而控制转向动力缸活塞两侧油室的旁路液压油流量,来改变转向盘上的转向力。车速越高,流过电磁阀电磁线圈的平均电流值越大,电磁阀阀针的开启程度越大,旁路液压油流量越大,液压助力作用越小,使转动转向盘的力也随之增加。这就是流量控制式动力转向系统的工作原理。
图 2所示为该系统电磁阀的结构。图 3为电磁阀的驱动信号。由图可以看出,驱动电磁阀电磁线圈的脉冲电流信号频率基本不变,但随着车速增大,脉冲电流信号的占空比将逐渐增大,使流过电磁线圈的平均电流值随车速的升高而增大。
图 4所示为凌志轿车电子控制动力转向系统的电路图。
(二)反力控制式EPSTOP
图 5所示为反力控制式动力转向系统的工作原理图。由图可见,系统主要由转向控制阀、分流阀、电磁阀、转向动力缸、转向油泵、储油箱、车速传感器(图中未画出)及电子控制单元等组成。
转向控制阀是在传统的整体转阀式动力转向控制阀的基础上增设了油压反力室而构成。扭力杆的上端通过销子与转阀阀杆相连,下端与小齿轮轴用销子连接。小齿轮轴的上端部通过销子与控制阀阀体相连。转向时,转向盘上的转向力通过扭力杆传递给小齿轮轴。当转向力增大,扭力杆发生扭转变形时,控制阀体和转阀阀杆之间将发生相对转动,于是就改变了阀体和阀杆之间油道的通、断关系和工作油液的流动方向,从而实现转向助力作用。
分流阀是把来自转向油泵的机油向控制阀一侧和电磁阀一侧进行分流的阀。按照车速和转向要求,改变控制阀一侧与电磁阀一侧的油压,确保电磁阀一侧具有稳定的机油流量。
固定小孔的作用是把供给转向控制阀的一部分流量分配到油压反力室一侧。
电磁阀的作用是根据需要将油压反力室一侧的机油流回储油箱电子控制单元(ECU)根据车速的高低线性控制电磁阀的开口面积。当车辆停驶或速度较低时,ECU使电磁线圈的通电电流增大,电磁阀开口面积增大,经分流阀分流的机油,通过电磁阀重新回流到储油箱中,所以作用于柱塞的背压(油压反力室压力)降低。于是柱塞推动控制阀转阀阀杆的力(反力)较小,因此只需要较小的转向力就可使扭力杆扭转变形,使阀体与阀杆发生相对转动而实现转向助力作用。
当车辆在中高速区域转向时,ECU使电磁线圈的通电电流减小,电磁阀开口面积减小,所以油压反力室的油压升高,作用于柱塞的背压增大,于是柱塞推动转阀阀杆的力增大,此时需要较大的转向力才能使阀体与阀杆之间作相对转动(相当于增加了扭力杆的扭转刚度),而实现转向助力作用,所以在中高速时可使驾驶员获得良好的转向手感和转向特性。
(三)阀灵敏度控制式EPSTOP
阀灵敏度控制式EPS是根据车速控制电磁阀,直接改变动力转向控制阀的油压增益(阀灵敏度)来控制油压的方法。这种转向系统结构简单、部件少、价格便宜,而且具有较大的选择转向力的自由度,可以获得自然的转向手感和良好的转向特性。
图 6所示为89型地平线牌轿车所采用的阀灵敏度控制式动力转向系统。该系统在转向控制阀的转子阀作了局部改进,并增加了电磁阀、车速传感器和电子控制单元等。
转子阀的可变小孔分为低速专用小孔(lR、1L、2R、2L)和高速专用小孔(3R、3L)两种,在高速专用可变孔的下边设有旁通电磁阀回路。图 7所示为该系统的阀部等效液压回路,其工作过程如下:
当车辆停止时,电磁阀完全关闭,如果此时向右转动转向盘,则高灵敏度低速专用小孔1R及2R在较小的转向扭矩作用下即可关闭,转向油泵的高压油液经lL流向转向动力缸右腔室,其左腔室的油液经3L、2L流回储油箱。所以此时具有轻便的转向特性。而且施加在转向盘上的转向力矩越大,可变小孔lL、2L的开口面积越大,节流作用越小,转向助力作用越明显。
随着车辆行驶速度的提高,在电子控制单元的作用下,电磁阀的开度也线性增加,如果向右转动转向盘,则转向油泵的高压油液经lL、3R旁通电磁阀流回储油箱。此时,转向动力缸右腔室的转向助力油压就取决于旁通电磁阀和灵敏度低的高速专用可变孔3R的开度。车速越高,在电子控制单元的控制下,电磁阀的开度越大,旁路流量越大,转向助力作用越小;在车速不变的情况下,施加在转向盘上的转向力越小,高速专用小孔3R的开度越大,转向助力作用也越小,当转向力增大时,3R的开度逐渐减小,转向助力作用也随之增大。由此可见,阀灵敏度控制式动力转向系统可使驾驶员获得非常自然的转向手感和良好的速度转向特性。
三、电动式电子控制动力转向系统
液压式动力转向系统由于工作压力和工作灵敏度较高,外廓尺寸较小,因而获得了广泛的应用。在采用气压制动或空气悬架的大型车辆上,也有采用气压动力转向的。但这类动力转向系统的共同缺点是结构复杂、消耗功率大,容易产生泄漏,转向力不易有效控制等。近年来随着微机在汽车上的广泛应用,出现了电动式电子控制动力转向系统,简称电动式EPS。
(一)电动式EPS的组成、原理与特点TOP
电动式EPS通常由扭矩传感器、车速传感器、电子控制单元(ECU)、电动机和电磁离合器等组成(如图 8所示)。电动式EPS是利用电动机作为助力源,根据车速和转向参数等,由电子控制单元完成助力控制,其原理可概括如下:
当操纵转向盘时,装在转向盘轴上的扭矩传感器不断地测出转向轴上的扭短信号,该信号与车速信号同时输入到电子控制单元。电控单元根据这些输入信号,确定助力扭矩的大小和方向,即选定电动机的电流和转向,调整转向辅助动力的大小。电动机的扭矩由电磁离合器通过减速机构减速增扭后,加在汽车的转向机构上,使之得到一个与汽车工况相适应的转向作用力。
电动式EPS有许多液压式动力转向系统所不具备的优点:
(1)将电动机、离合器、减速装置、转向杆等各部件装配成一个整体,这既无管道也无控制阀,使其结构紧凑、质量减轻。一般电动式EPS的质量比液压式EPS质量轻25%左右。
(2)没有液压式动力转向系统所必须的常运转转向油泵,电动机只是在需要转向时才接通电源,所以动力消耗和燃油消耗均可降到最低。
(3)省去了油压系统,所以不需要给转向油泵补充油,也不必担心漏油。
(4)可以比较容易地按照汽车性能的需要设置、修改转向助力特性。
(二)电动式EPS主要部件的结构及工作原理
1.扭矩传感器
扭矩传感器的作用是测量转向盘与转向器之间的相对扭矩,以作为电动助力的依据之一。图 9所示为无触点式扭矩传感器的结构及工作原理图。在输出轴的极靴上分别绕有A、B、C、D四个线圈,转向盘处于中间位置(直驶)时,扭力杆的纵向对称面正好处于图示输出轴极靴AC、BD的对称面上。当在U、T两端加上连续的输入脉冲电压信号Ui时由于通过每个极靴的磁通量相等,所以在V、W两端检测到的输出电压信号Uo=0。转向时,由于扭力杆和输出轴极靴之间发生相对扭转变形,极靴A、D之间的磁阻增加,B、C之间的磁阻减少,各个极靴的磁通量发生变化,于是在V、W之间就出现了电位差。其电位差与扭力杆的扭转角。和输入电压Ui成正比。如果比例系数为K,则有Uo=KUiθ所以,通过测量V、W两端的电位差就可以测量出扭力杆的扭转角,于是也就知道了转向盘施加的转动扭矩。图 10所示为滑动可变电阻式扭矩传感器的结构。它是将负载力矩引起的扭力杆角位移转换为电位器电阻的变化,并经滑环传递出来作为扭矩信号。
2.电动机
电动式EPS用电动机与启动用直流电动机原理上基本相同,但一般采用永磁磁场。其最大电流一般为3OA左右,电压为DC12V,额定转矩为1ONm左右。
转向助力用直流电动机需要正反转控制,图 11所示为一种比较简单适用的控制电路。a1、a2为触发信号端。当a1端得到输入信号时,晶体管T3导通,T2得到基极电流而导通,电流经T2、电动机M、T3、搭铁而构成回路,于是电机正转;当a2端得到输入信号时,电流则经T1、M、T4、搭铁而构成回路,电机则因电流方向相反而反转。控制触发信号端电流的大小,就可以控制通过电动机电流的大小。
3.电磁离合器
图 12为单片干式电磁离合器的工作原理图。当图 10滑动可变电阻式扭矩传感器结构电流通过滑环进入电磁离合器线圈时,主动轮产生电磁吸力,带花键的压板被吸引与主动轮压紧,于是电动机的动力经过轴、主动轮、压板、花键、从动轴传递给执行机构。
电动式EPS一般都设定一个工作范围,例如当车速达到45km/h时,就不需要辅助动力转向,这时电动机就停止工作,为了不使电动机和电磁离合器的惯性影响转向系的工作,离合器应及时分离,以切断辅助动力。另外当电动机发生故障时,离合器会自动分离,这时仍可利用手动控制转向。
4.减速机构
减速机构是电动式EPS不可缺少的部件。目前实用的减速机构有多种组合方式,一般采用蜗轮蜗杆与转向轴驱动组合式,也有的采用两级行星齿轮与传动齿轮组合式。为了抑制噪声和提高耐久性,减速机构中的齿轮有的采用特殊齿形,有的采用树脂材料制成。
(三)电动式EPS实例TOP
图 13所示为Alto汽车电动式EPS配件布置图。该系统由扭矩传感器、车速传感器、电子控制单元、电动机和减速机构组成。扭矩传感器(滑动可变电阻型)、电动机和减速机构制成一个整体(见图 14),安装在转向柱上,电磁离合器安装在电动机的输出端旁,电子控制单元安装在司机座位下面。
图 15所示为Alto车用扭矩传感器的结构。当转向系统工作时,施加在转向盘上的转向力经输入轴、扭杆传递给输出轴,扭杆的扭曲变形使输入轴与输出轴之间发生相对扭转,与此同时滑块沿轴向移动,控制臂将滑块的轴向移动变换成电位器的旋转角度,即将转矩值变换成电压量,并输入到电子控制单元。
当转向盘处于中间位置时,传感器的输出电压为2.5V;当转向盘向右旋转时,其输出电压大于2.5V;当转向盘向左旋转时,其输出电压小于2.5V,扭矩传感器的输出特性如图 16所示。因此,电子控制单元根据传感器输出电压的高低,就可以判定转向盘的转动方向和转动角度。
图 17所示为Alto汽车电动式EPS控制方框图。其控制内容如下:
1.电动机电流控制
电子控制单元根据转向力矩和车速信号确定并控制电动机的驱动电流方向和大小。使其在每一种车速下都可以得到最优化的转向助力扭矩。
2.速度控制
当车速高于43-52km/h时,停止对电动机供电的同时,使电动机内的电磁离合器分离,按普通转向控制方式工作,以确保行车安全。
3.临界控制
这是为了保护系统中的电动机以及控制组件而设的控制项目。在转向器偏转至最大(即临界状态)时,由于此时电动机不能转动,所以流入电动机的电流达最大值,为了避免持续大电流使电动机及控制组件发热损坏,所以每当较大电流连续通过3Os后,系统就会控制电流使之逐渐减小。当临界控制状态解除后,控制系统就会再逐渐增大电流,一直达到正常的工作电流值为止。
4.自诊断和安全控制
该系统的电子控制单元具有故障自诊断功能,当电子控制单元检测出系统存在故障时都可显示出相应的故障代码,以便采取相应的措施。当检测出系统的基本部件如扭矩传感器、电动机、车速传感器等出现故障而导致系统处于严重故障的情况下,系统就会使电磁离合器断开,停止转向助力控制,力图确保系统安全、可靠。





























